IEEE ICACT 2025 — Published
Author-Oriented Semantic Plagiarism Detection Using Transformer Architectures
DOI: 10.1109/ICACT67549.2025.11351398
/ initializing_cv_system
/ sequence_initiated
/ initializing_cv_system
/ sequence_initiated
struct group_info init_groups = { .usage = ATOMIC_INIT(2) };
struct group_info *groups_alloc(int gidsetsize){
struct group_info *group_info;
int nblocks;
int i;
nblocks = (gidsetsize + NGROUPS_PER_BLOCK - 1) / NGROUPS_PER_BLOCK;
/* Make sure we always allocate at least one indirect block pointer */
nblocks = nblocks ? : 1;
group_info = kmalloc(sizeof(*group_info) + nblocks*sizeof(gid_t *), GFP_USER);
if (!group_info)
return NULL;
group_info->ngroups = gidsetsize;
group_info->nblocks = nblocks;
atomic_set(&group_info->usage, 1);
if (gidsetsize
<= NGROUPS_SMALL)
group_info->blocks[0] = group_info->small_block;
else {
for (i = 0; i
< nblocks; i++) {
gid_t *b;
b = (void *)__get_free_page(GFP_USER);
if (!b)
goto out_undo_partial_alloc;
group_info->blocks[i] = b;
}
}
return group_info;
EXPORT_SYMBOL(groups_alloc);
void groups_free(struct group_info *group_info)
{
if (group_info->blocks[0] != group_info->small_block) {
int i;
for (i = 0; i < group_info->nblocks; i++)
free_page((unsigned long)group_info->blocks[i]);
}
kfree(group_info);
}
EXPORT_SYMB|
/ initializing_cv_system
/ sequence_initiated
/ initializing_cv_system
/ sequence_initiated
struct group_info init_groups = { .usage = ATOMIC_INIT(2) };
struct group_info *groups_alloc(int gidsetsize){
struct group_info *group_info;
int nblocks;
int i;
nblocks = (gidsetsize + NGROUPS_PER_BLOCK - 1) / NGROUPS_PER_BLOCK;
/* Make sure we always allocate at least one indirect block pointer */
nblocks = nblocks ? : 1;
group_info = kmalloc(sizeof(*group_info) + nblocks*sizeof(gid_t *), GFP_USER);
if (!group_info)
return NULL;
group_info->ngroups = gidsetsize;
group_info->nblocks = nblocks;
atomic_set(&group_info->usage, 1);
if (gidsetsize
<= NGROUPS_SMALL)
group_info->blocks[0] = group_info->small_block;
else {
for (i = 0; i
< nblocks; i++) {
gid_t *b;
b = (void *)__get_free_page(GFP_USER);
if (!b)
goto out_undo_partial_alloc;
group_info->blocks[i] = b;
}
}
return group_info;
EXPORT_SYMBOL(groups_alloc);
void groups_free(struct group_info *group_info)
{
if (group_info->blocks[0] != group_info->small_block) {
int i;
for (i = 0; i < group_info->nblocks; i++)
free_page((unsigned long)group_info->blocks[i]);
}
kfree(group_info);
}
EXPORT_SYMB|
/ Initialising Portfolio...
/ sequence_initiated
/

loading...
I am Viswa Gandamalla, an AI & Automotive Engineer based in Ingolstadt, Germany. Currently a Student Assistant at the German Aerospace Center (DLR) developing camera-LiDAR sensor fusion pipelines for autonomous driving, and at CARISSMA working on 3D reconstruction for battery research. I hold a Masters in International Automotive Engineering from TH Ingolstadt (2025), specializing in perception, sensor fusion, and autonomous systems.
Programming: Python, C, C++, ROS2. ML/AI: PyTorch, TensorFlow, Keras, Scikit-learn. LLM & AI Apps: LangChain, RAG, OpenAI API, Hugging Face, ChromaDB, AstraDB, Streamlit. Automotive: AUTOSAR, ISO 26262, CAN/LIN/FlexRay/Ethernet. Simulation: MATLAB/Simulink, Gazebo, CARLA, CANoe. Cloud & Dev Tools: Git, AWS, Flask. Holds EU Class B Driver's License and Audi FFZ certification.
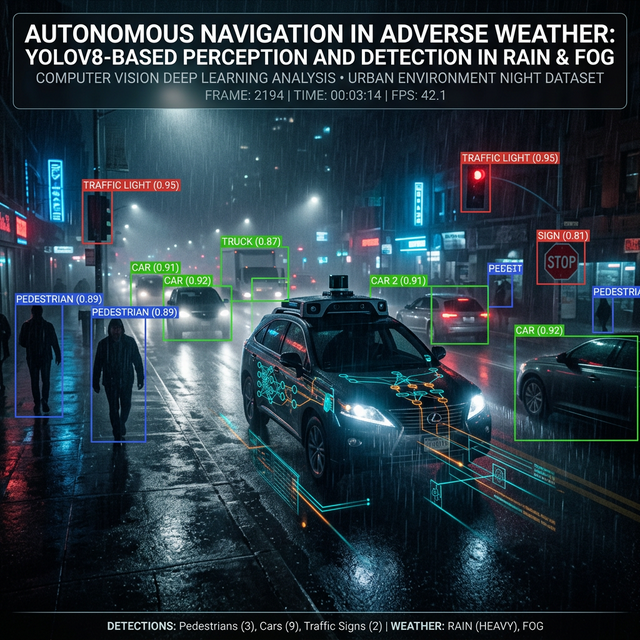
Currently at DLR (German Aerospace Center) developing camera-LiDAR sensor fusion with Extended Kalman Filter for the uShift urban mobility project. Also at CARISSMA building a Python + Open3D tool for real-time 3D pouch cell volume measurement using four Intel RealSense D435 cameras. Previously completed a Master Thesis at Akkodis benchmarking YOLOv8, RT-DETR and HOG+SVM on TurtleBot3, achieving 88.7% mAP.
Full autonomous robotics stack: custom controllers (pose-to-pose & circular trajectory), Nav2, SLAM Toolbox, and frontier-based exploration. Modular ROS 2 package with behavior-tree recovery.
Stack: ROS 2 Humble · Nav2 · SLAM Toolbox · Gazebo · Python · URDF/Xacro
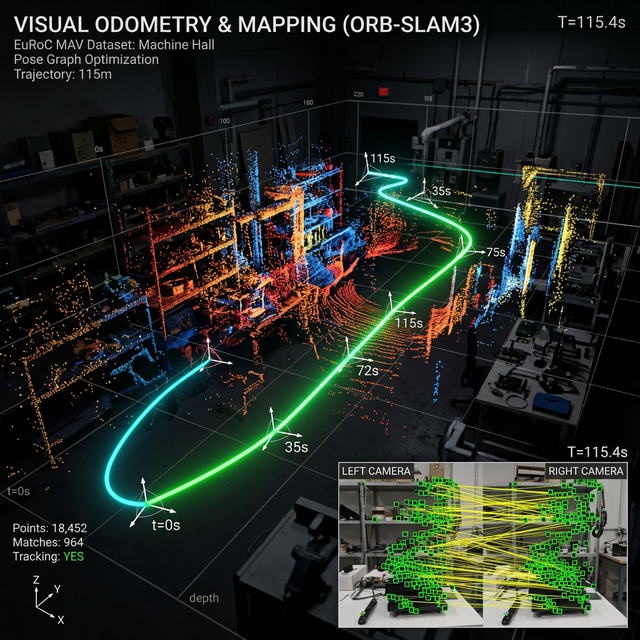
Integrated ORB-SLAM3 into ROS 2 for real-time trajectory estimation on EuRoC/Vicon Room dataset. Implemented landmark initialization, feature tracking, motion estimation, and continuous triangulation.
Stack: C++ · ROS 2 · ORB-SLAM3 · OpenCV · Eigen
Masters in International Automotive Engineering
Dept: Electrical Engineering and Information Technology
Key courses: Mathematical Modeling & Simulation, Integrated Safety & Assistance Systems,
Sensor Technology & Signal Processing, Automotive Radar Systems, Development Methodologies for Automotive Systems
Award: Deutschlandstipendium
Bachelors in Mechanical Engineering
Award: Academic Excellence Award
DLR (German Aerospace Center): Developing a camera-LiDAR sensor fusion pipeline using Extended Kalman Filter for pose estimation in the uShift urban mobility project.
CARISSMA: Python-based tool for real-time pouch cell volume measurement via convex hull 3D reconstruction using four calibrated Intel RealSense D435 cameras.
CARISSMA: Analyzed deep discharge and EIS test data to assess battery degradation and SEI condition. Built structured data catalog for voltage and resistance trend analysis.
Object detection pipelines (YOLOv8, RT-DETR, HOG+SVM) on TurtleBot3 with RealSense D405. Best mAP: YOLOv8 88.7%. Managed with Jira & Confluence in agile team.
Full ROS 2 stack: pose-to-pose & circular trajectory controllers, Nav2, SLAM Toolbox, frontier-based exploration, and behavior-tree recovery mechanisms.
ORB-SLAM3 integrated into ROS 2 for real-time trajectory estimation on EuRoC/Vicon Room dataset. Landmark initialization, feature tracking, and continuous triangulation.
U-Net encoder-decoder with skip connections for urban scene segmentation on Cityscapes-style data. Combined cross-entropy and Dice loss to handle class imbalance.
Two papers published at IEEE ICACT 2025: Semantic Plagiarism Detection using Transformers, and Sarcasm-Aware Neural Translation for low-resource languages.